Настройка гида в MaxImDL
Решил поделиться своим опытом и немного теорией по настройке гида в MaxImDL. Тем более, что на днях, этот вопрос обсуждался на украинском форуме, и еще свеж в моей памяти.
Не секрет, что система гидирования является одной из важных составляющих для получения качественного результата. И если она настроена правильно, то на выходе мы получаем качественные снимки. Если есть ошибки в настройках, появляется много брака.
Начнем с теории. Все мы знаем, что одной из основных проблем в получении качественных снимков является турбуленция атмосферы, которая "размывает" звезду в рамках определенного значения угловых секунд и измеряется как значение FWHM звезды. Часто это явление еще называют сиинг (от английского слова - seeing). Принято считать, что сиинг, равный 2" или менее, является наиболее оптимальным значением для получения качественных снимков. При увеличении этого значения звезды начинают "распухать" и качество снимка ухудшается. Что же происходит с звездой на самом деле?
Турбуленция атмосферы двигает (колеблет) звезду в разные стороны в рамках определенного углового расстояния и, тем самым, делает из звезды пятно определенной угловой величины. Как правило, звезда колеблется с частотой порядка нескольких раз в секунду.
Теперь вернемся к нашему астросетапу и настройке гида. Система гидирования позволяет путем обратной связи двигать монтировку вслед за смещением звезды, тем самым компенсировать это смещение. Смещаться звезда может по разным причинам. Как пример, не правильно выставленная полярка, прогибы астросетапа, периодика монтировки и т.д. Одной из причин смещения также является и турбуленция, о которой я писал выше. Однако, нужно понимать, что мы не сможем монтировкой компенсировать смещение звезды за счет турбуленции, так как частота колебаний звезды слишком велика, а реакция монтировки медленная. Поэтому, мы должны игнорировать такого рода смещения. Как это сделать? Как компенсировать все низкочастотные ошибки, а сиинг (как высокочастотное смещение) игнорировать? Вот про это я и хочу вам рассказать, на примере моего астросетапа, и моего опыта работы на нем.
Первая, и очень важная настройка, которая позволит исключить высокочастотные колебания звезды - это выдержка гидирующей камеры. Я не рекомендую ее делать меньше 3 сек. При меньшем времени выдержки вы будете получать не ровное пятно засветки звезды, а какую то фигуру, центр которой каждый раз будет смещаться и вы будете "гоняться монтировкой за сиингом", что не приведет к получению качественного результата.
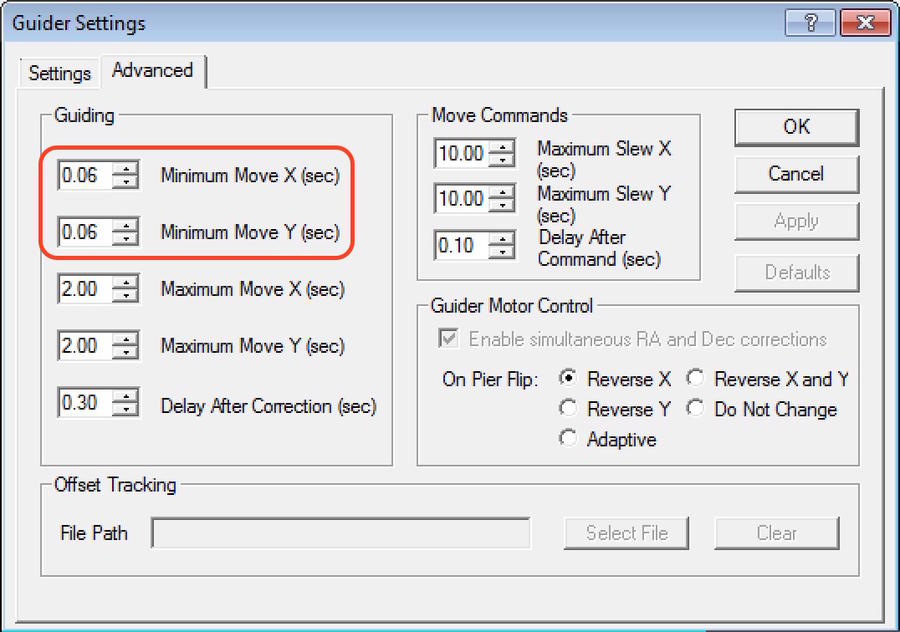
Вторая настройка - это минимальное время компенсации по осям. Выдержка в 3 сек. не позволяет нам полностью получить точное значение центра звезды. При увеличении этого времени мы будет получать более точный результат, однако, и вносить дополнительные ошибки самого астросетапа (периодика, неточное выставление полярки и т.д.), что делать при этом не нужно. При выдержке 3 сек. каждого снимка центр звезды будет смещаться на какую-то небольшую величину за счет турбуленции. Поэтому, необходимо указать, при каких значениях этого смещения не следует делать компенсацию монтировкой. Данная настройка делается на вкладке Advanced, в настройках гида. Как же определить оптимальные значения для данной настройки? Здесь нет какого-то общего, уникального решения. Для каждого астросетапа оно свое. Я расскажу вам, как я делаю это на примере моего астросетапа, построенного на базе WS-240. Периодика данной монтировки составляет ±3" и является достаточно плавной.

Для себя я определил, что смещения менее ±0.3" не стоит компенсировать. Скажу сразу, что это достаточно высокое значение, так как хороший сиинг составляет порядка 2". Таким образом, я не хочу компенсировать отклонения, которые составляют менее 15% от величины сиинга.
Какое максимальное значение отклонение не компенсировать на вашем астросетапе, решать вам. Скорее всего надо сделать тест, как при хорошеем сиинге, так и при плохом. И уже на основании его, принимать окончательное решение по значению отклонения.
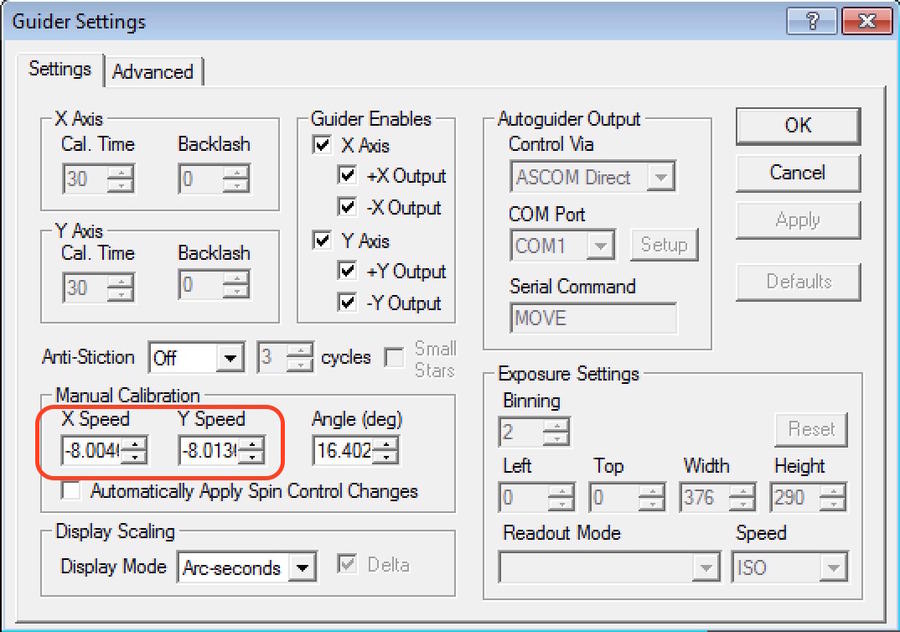
Теперь перейдем непосредственно к самим расчетам минимального времени компенсации. Рассмотрим пример с осью X. Для расчета необходимо знать разрешающую способность вашего гида. В моем случае, она составляет 0.62"/пиксель. Для определения минимального времени компенсации нам необходимо знать еще скорость движения монтировки при гидировании. Это значение вы можете получить после калибровки гида и найти его на вкладке Settings (см. первый скриншот). В моем случае, скорость гидирования по оси Х и Y составляет порядка 8.0 пикселя/сек или 8.0пиксель/сек. 0.62"/пиксель=4.96"/сек. Для нахождения времени, за которое монтировка сдвинется на 0.3" нам необходимо 0.3"/4.96"/сек.=0.06сек. Это значение и нужно указать в настройках гидирования, в MaxImDL.
Такую же процедуру расчета проделываем и для оси Y. В моем случае, она будет полностью аналагичная, так как скорость по оси Y равна скорости по оси Х.
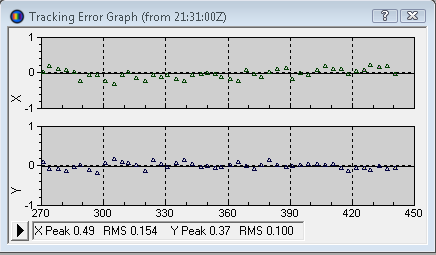
Сделав данные настройки по двум осям, я получаю приемлемое значение RMS порядка 0.1"-0.2" по каждой оси.
Кстати, в конце
Кстати, в конце предпоследнего абзаца описка - там написано 0.2"/5.0"/сек=0.06сек.
Правильно не 0.2", а 0.3" и лучше написать не 5.0", а 4.96" чтобы было однозначно понятно о чем речь.
Цифры в статье исправил.
Цифры в статье исправил. Спасибо.
Да. Ты прав. Я там просто
Да. Ты прав. Я там просто округлял. Все равно время только в сотых можно указать.
Андрей, может я неправильно
Андрей, может я неправильно понимаю, но зачем стремиться к RMS порядка 0.1-0.2", если сиинг составляет к примеру 2"? Ведь такой сиинг означает, что даже ошибки с RMS 0.9" полностью утонут в колебаниях атмосферы? Т.е. для любого сетапа качества гидирования с RMS 0.5-0.7" будет гарантированно достаточно для наших условий? Или нет?
Все очень просто. Когда мы
Все очень просто. Когда мы ставим выдержку гид камеры 3 сек, то убираем все высокочастотные колебания и центр звезды определяется Максимом с учетом высокочастотных колебаний, т.е. сиинг при 3 секундной выдержке. Дальше мы хотим уменьшить RMS на низкочастотных колебаниях. Здесь можно было бы стремиться к RMS=0", но нужно понимать что есть еще монтировка, которая имеет мин. шаг сдвига (это в случае DC и энкодеров), ну и еще какой то запас, вот и получаем 0.2". Т.е. если звезда будет отклоняться от центра менее чем на 0.2", то мы править эту ошибку не будем. Т.е. мы получаем сиинг (при 3 сек выдержки) + RMS = конечный сиинг.
" Т.е. мы получаем сиинг (при
" Т.е. мы получаем сиинг (при 3 сек выдержки) + RMS = конечный сиинг. "
На самом деле получается не совсем так. Наверное, зависит от разрешения сетапа и еще много чего. Понятно, что RMS уж точно не вычитается и на длительных выдержках FWHM не станет лучше чем на коротких. Но вот что он просто суммируется - это не похоже. Ведь мы уже учли колебания барицентра звезды из-за сиинга в своих трехсекундных выдержках гида. И большинство ошибок монтировки не будут выходить за пределы этой области. Но некоторые изредка могут и выйти, конечно. Поэтому мне кажется RMS ошибки гидирования чуток увеличивает итоговый FWHM звезды, не не суммирутеся с сиингом, т.е. не влияет так сильно, пока не превосходит сиинг.